busybox
- A Linux system needs a basic set of programs to work
- An init program
- A shell
- Various basic utilities for file manipulation and system configuration
- In normal Linux systems, these programs are provided by different projects
- coreutils, bash, grep, sed, tar, wget, modutils, etc. are all different projects
- A lot of different components to integrate
- Components not designed with embedded systems constraints in mind: they are not very configurable and have a wide range of features
Busybox is an alternative solution, extremely common on embedded systems
Rewrite of many useful Unix command line utilities
- Integrated into a single project, which makes it easy to work with
- Designed with embedded systems in mind: highly configurable, no unnecessary features
- All the utilities are compiled into a single executable, /bin/busybox
- Symbolic links to /bin/busybox are created for each application integrated into Busybox
- For a fairly featureful configuration, less than 500 KB (statically compiled with uClibc) or less than 1 MB (statically compiled with glibc).
- http://www.busybox.net/
Applet highlight: Busybox init
- Busybox provides an implementation of an init program
- Simpler than the init implementation found on desktop/server systems: no runlevels are implemented
- A single configuration file: /etc/inittab
- Each line has the form
:: :
- Each line has the form
- Allows to run services at startup, and to make sure that certain services are always running on the system
- See examples/inittab in Busybox for details on the configuration
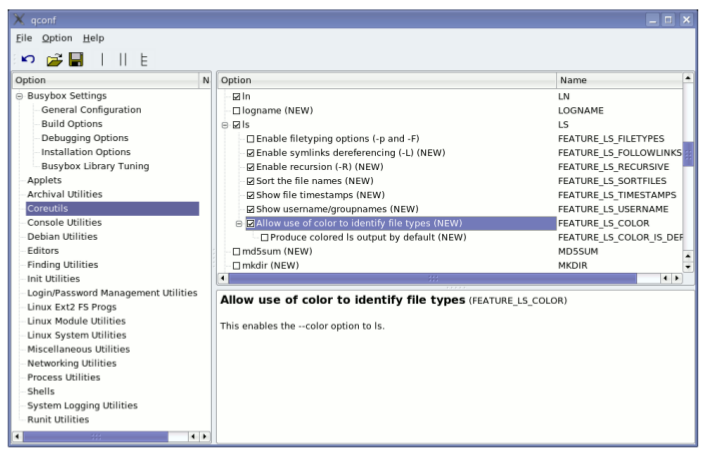
Configuring BusyBox
- Get the latest stable sources from http://busybox.net
- Configure BusyBox (creates a .config file):
- make defconfig Good to begin with BusyBox. Configures BusyBox with all options for regular users.
- make allnoconfig Unselects all options. Good to configure only what you need.
- make xconfig (graphical, needs the libqt3-mt-dev package) or make menuconfig (text) Same configuration interfaces as the ones used by the Linux kernel (though older versions are used).
Compiling BusyBox
- Set the cross-compiler prefix in the configuration interface:
BusyBox Settings -> Build Options -
Cross Compiler prefix Example: arm-linux-
- Set the installation directory in the configuration interface:
BusyBox Settings -> Installation Options -
BusyBox installation prefix
- Add the cross-compiler path to the PATH environment variable:
export PATH=/home/
/x-tools/arm-unknown-linux-uclibcgnueabi/bin:$PATH - Compile BusyBox: make
- Install it (this creates a Unix directory structure symbolic links to the busybox executable): make install