PREEMPT_RT
- Long-term project lead by Linux kernel developers Ingo Molnar, Thomas Gleixner and Steven Rostedt
- The goal is to gradually improve the Linux kernel regarding real-time requirements and to get these improvements merged into the mainline kernel
- PREEMPT_RT development works very closely with the mainline development
- Many of the improvements designed, developed and debugged inside PREEMPT_RT over the years are now part of the mainline Linux kernel
- The project is a long-term branch of the Linux kernel that ultimately should disappear as everything will have been merged
Improvements in the mainline kernel
From the PREEMPT_RT project
- Since the beginning of 2.6
- O(1) scheduler
- Kernel preemption
- Better POSIX real-time API support
- Since 2.6.18
- Priority inheritance support for mutexes
- Since 2.6.21
- High-resolution timers
- Since 2.6.30
- Threaded interrupts
- Since 2.6.33
- Spinlock annotations
New preemption options in Linux 2.6
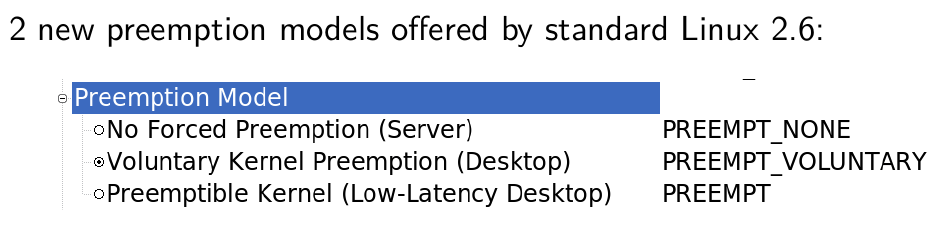
1st option: no forced preemption CONFIG_PREEMPT_NONE Kernel code (interrupts, exceptions, system calls) never preempted. Default behavior in standard kernels.
- Best for systems making intense computations, on which overall throughput is key.
- Best to reduce task switching to maximize CPU and cache usage (by reducing context switching).
- Still benefits from some Linux 2.6 improvements: O(1) scheduler, increased multiprocessor safety (work on RT preemption was useful to identify hard to find SMP bugs).
- Can also benefit from a lower timer frequency (100 Hz instead of 250 or 1000).
2nd option: voluntary kernel preemption CONFIG_PREEMPT_VOLUNTARY Kernel code can preempt itself
- Typically for desktop systems, for quicker application reaction to user input.
- Adds explicit rescheduling points throughout kernel code.
- Minor impact on throughput.
- Used in: Ubuntu Desktop 15.04, Ubuntu Server 14.04
3rd option: preemptible kernel CONFIG_PREEMPT Most kernel code can be involuntarily preempted at any time. When a process becomes runnable, no more need to wait for kernel code (typically a system call) to return before running the scheduler.
- Exception: kernel critical sections (holding spinlocks). In a case you hold a spinlock on a uni-processor system, kernel preemption could run another process, which would loop forever if it tried to acquire the same spinlock.
- Typically for desktop or embedded systems with latency requirements in the milliseconds range.
- Still a relatively minor impact on throughput.
Priority inheritance
One classical solution to the priority inversion problem is called priority inheritance
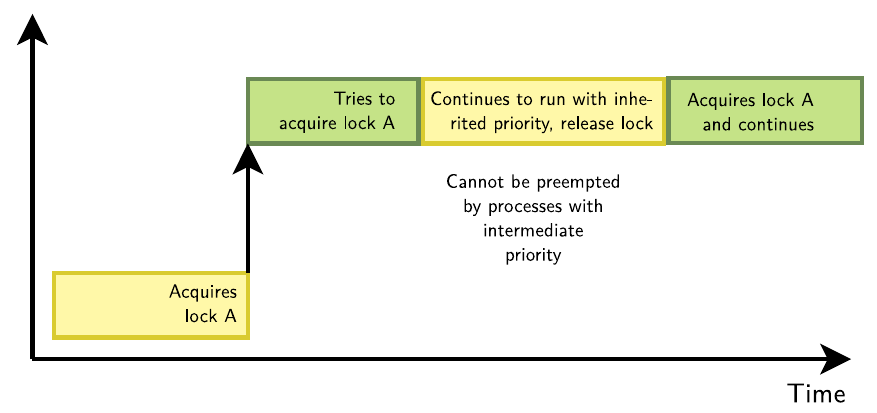
- In Linux, since 2.6.18, mutexes support priority inheritance
- In user space, priority inheritance must be explicitly enabled on a per-mutex basis.
High resolution timers
- The resolution of the timers used to be bound to the resolution of the regular system tick
- Usually 100 Hz or 250 Hz, depending on the architecture and the configuration
- A resolution of only 10 ms or 4 ms.
- Increasing the regular system tick frequency is not an option as it would consume too many resources
- The high-resolution timers infrastructure, merged in 2.6.21, allows to use the available hardware timers to program interrupts at the right moment.
- Hardware timers are multiplexed, so that a single hardware timer is sufficient to handle a large number of software-programmed timers.
- Usable directly from user space using the usual timer APIs
Threaded interrupts
- To solve the interrupt inversion problem, PREEMPT_RT has introduced the concept of threaded interrupts
- The interrupt handlers run in normal kernel threads, so that the priorities of the different interrupt handlers can be configured
- The real interrupt handler, as executed by the CPU, is only in charge of masking the interrupt and waking-up the corresponding thread
- The idea of threaded interrupts also allows to use sleeping spinlocks (see later)
- Merged since 2.6.30, the conversion of interrupt handlers to threaded interrupts is not automatic: drivers must be modified
- In PREEMPT_RT, all interrupt handlers are switched to threaded interrupts
The future of the PREEMPT_RT patchset
- Before Oct. 2015: project stalled because of the lack of funding. Thomas Gleixner still the maintainer but lacked time for further development and mainlining efforts. Patch releases only made for specific kernel releases.
- Oct. 2015: the Linux Foundation at last got funding for mainlining the patchset into the Linux kernel (see http://lwn.net/Articles/659193/).
- There's at last a good chance for the patchset to be merged by the end of 2016.